Get home
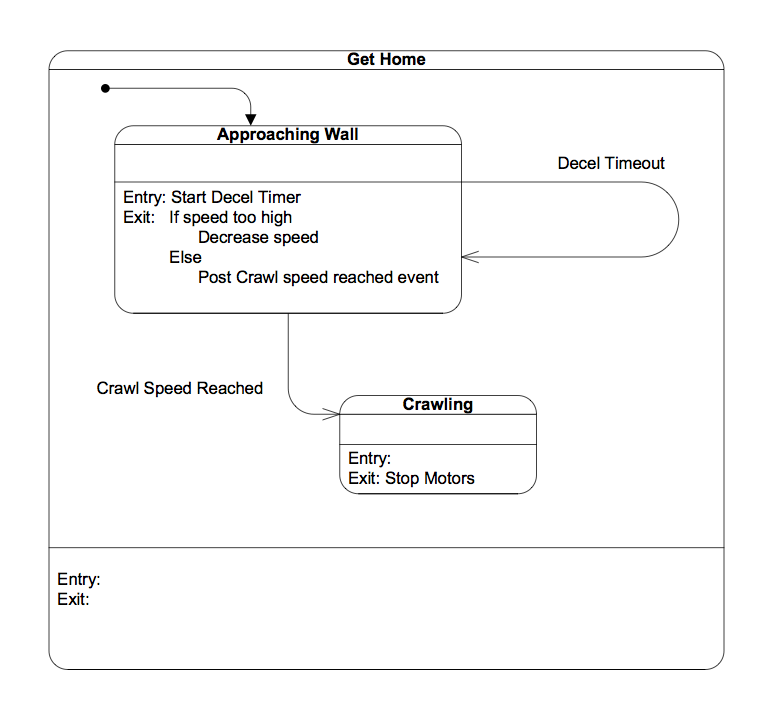
In multiple cases, we needed the robot to continue towards the wall and slow down before contact. Each case was condensed into a single state machine Get Home. On contact with the wall, a round-based decision switched to Firing At Goal or Reloading.
| gethomehsm.h.rtf |
| gethomehsm.c.rtf |
