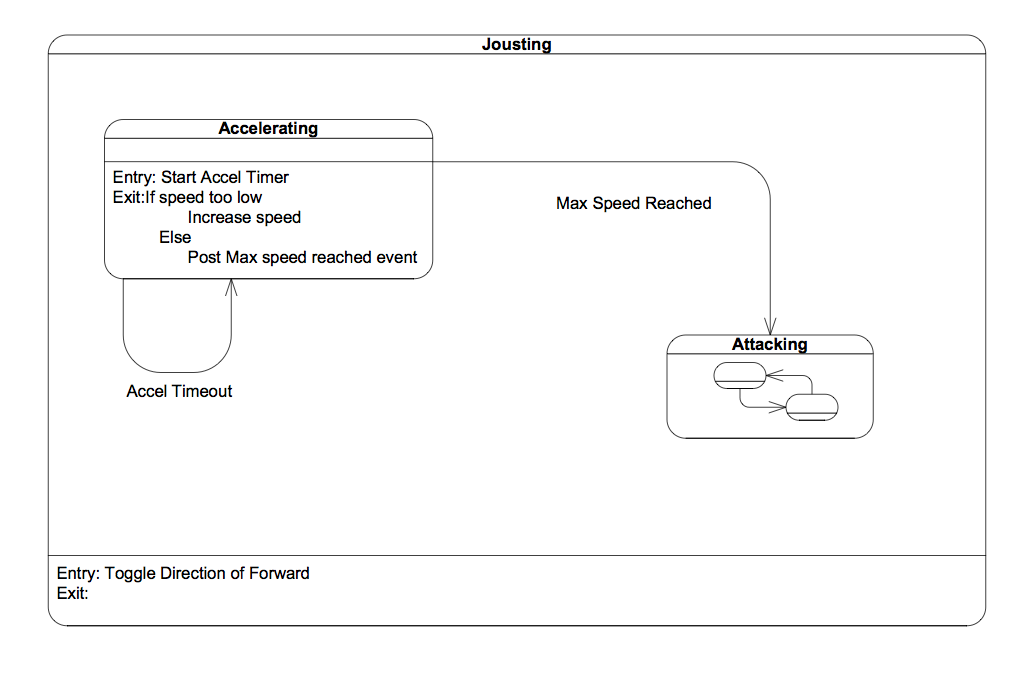
Jousting
Jousting is one of the simplest state machines. The robot will accelerate with a tuneable speed to ensure that the head is stable, then continue forward at maximum speed. In this period, a control algorithm is used to ensure that the robot follows a black line straight across the arena without veering into walls.
| joustinghsm.h.rtf |
| joustinghsm.c.rtf |
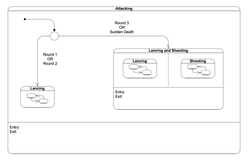
A quick round-based decision was made in Attacking of whether to shoot balls at the opponent (when the opponents IR beacon was detected) or to save balls for the next round.
| attackinghsm.h.rtf |
| attackinghsm.c.rtf |
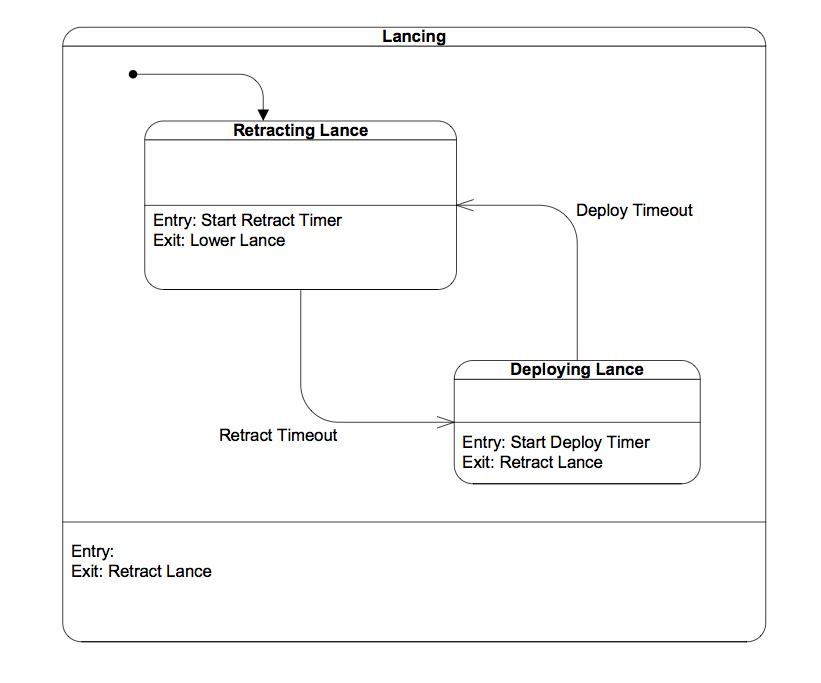
Lancing was controlled in a simple timed loop that raised and lowered the lance.
| lancinghsm.h.rtf |
| lancinghsm.c.rtf |
