Robot control
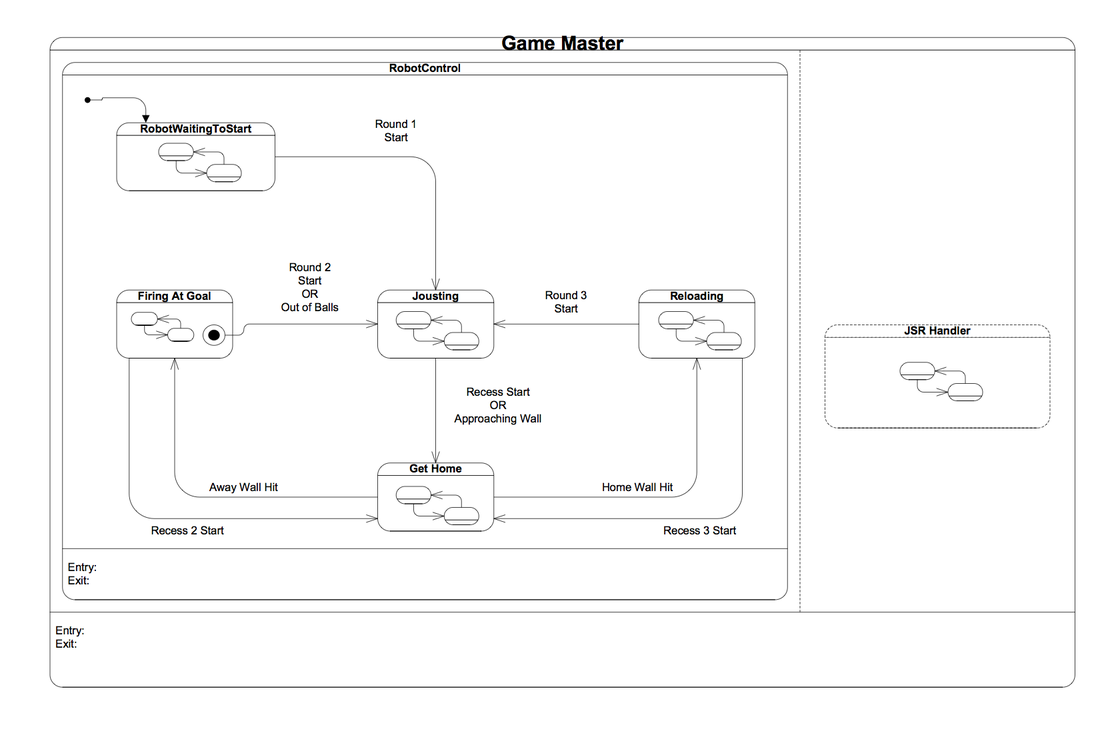
All of the actual robot responses to events were in Robot Control. The strategy implemented focused on jousting as long as possible each round until either the round ended or robot neared the wall. Then based on the current round, the robot would prepare to shoot at the goal or reload. Since we were able to decompose the jousting from the other responses, we designed a state machine that centered around the single state. This led to the overall simpler structure shown below.
| robotcontrolhsm.h.rtf |
| robotcontrolhsm.c.rtf |
